As per the recent suggestions in the Aurora Changes Discussion thread, I am looking at a new active sensor model for C# Aurora. There is an issue that active sensor ranges become so huge with large size-50 sensors, that the standard tactic is to create a ship with such a sensor so that it can watch the entire inner system, taking away some of the fog of war. In addition, such extreme-range sensors allow ultra-long range missile combat, giving the race that possesses such sensors a major advantage. The following change is intended to create a situation where:
a) Multiple scouts or pickets become a serious alternative to one huge sensor.
b) Missile combat ranges are reduced
c) Fog of war is increased, leading to more interesting exploration and combat.
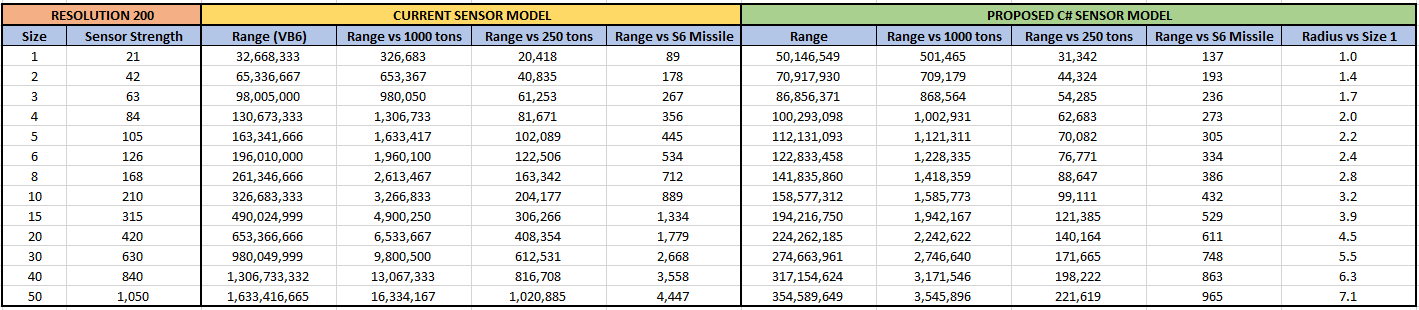
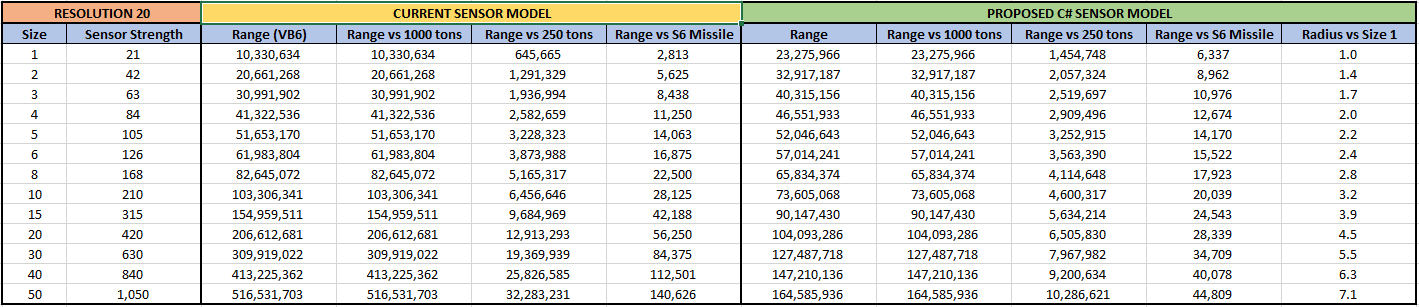
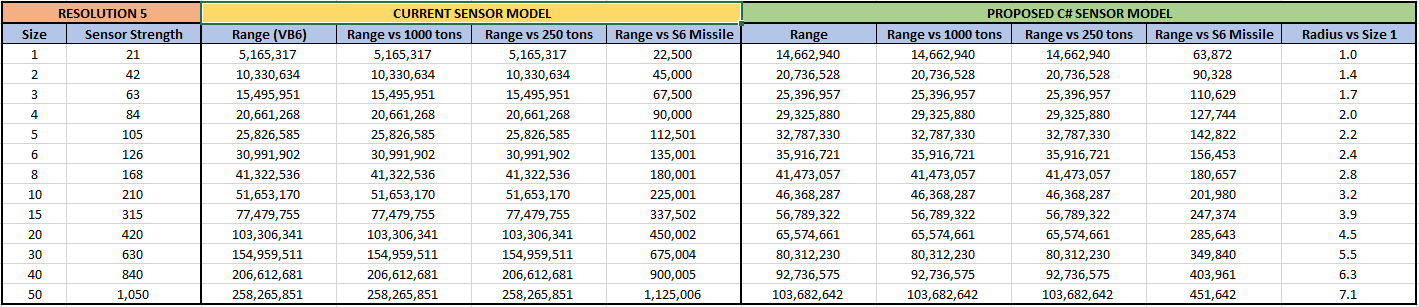
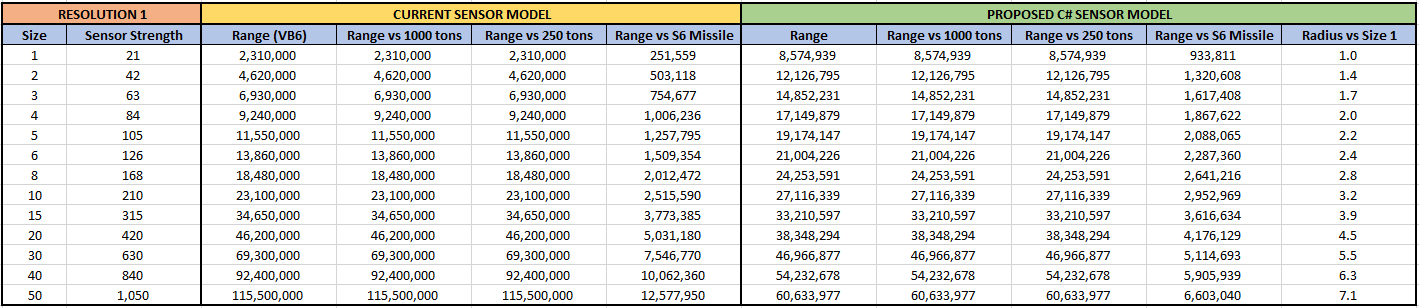
The VB6 sensor model is based on the following formula, which increases range in direct relation to sensor strength:
Sensor Range = Racial Sensor Strength * HS * Racial EM Sensitivity * SQRT(Resolution) * 10,000 km
The proposed C# model uses similar basics and leaves all the existing technology in place. However, the sensor strength now has to cover an area rather than a direct range, creating diminishing returns for larger sensors. In addition, the modifier for resolution has been adjusted from square root to the power of (1 / 1.5). Because of this formula, smaller, lower resolution sensors are now more effective than the VB6 equivalents (much more in some cases), making earlier detection of missiles and fighters possible for non-specialised ships. The new formula is:
Sensor Range = SQRT((Racial Sensor Strength * HS * Racial EM Sensitivity * (Resolution ^ (1/1.5)) / PI) * 1,000,000 km
The following screenshots are based on the Commonwealth in my current campaign, which has active sensor strength 21 and EM sensitivity 11.